

Набор датчиков – это измерительный объект, который можно разместить в любом месте расчётной области.
Ранее для вычисления переменной в определённой точке приходилось создавать маленький объект, соизмеримый с размерами ячейки, и снимать характеристику с этого объекта. С помощью датчиков это стало намного удобнее: можно просто выбрать точку или даже несколько точек в пространстве, и получать данные с этих точек в один glo-файл.
Что такое датчик
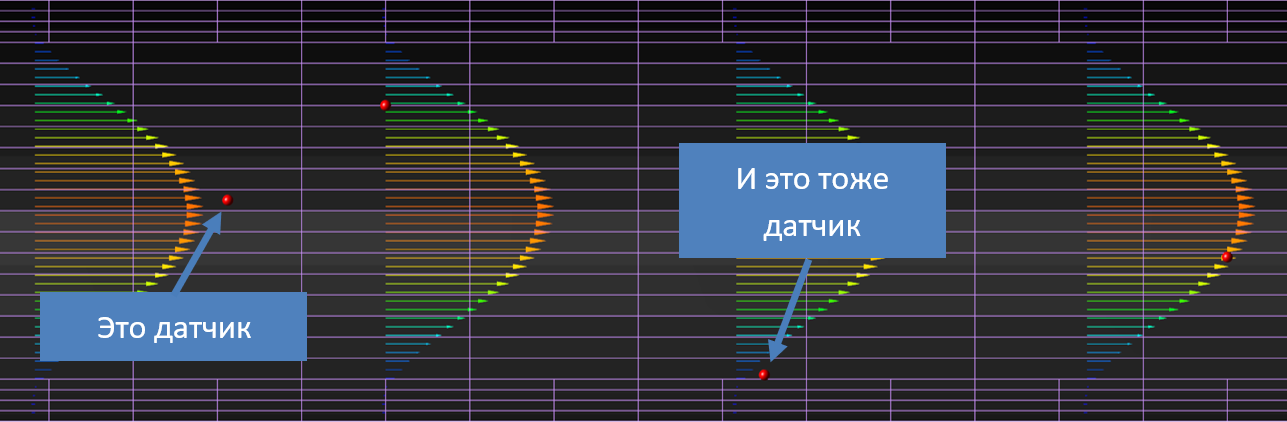
Датчик – это точка в пространстве, в которой фиксируются значения переменной. Переменная определяется либо в центре ячейки, в которую попал датчик, либо на поверхности фасетки, которой он присвоен.
Создание и модификация набора датчиков
Набор датчиков можно создать в папке Объекты, выбрав тип объекта «Набор датчиков».
В окне свойств датчиков можно совершать следующие действия:
- Создавать новые датчики, менять их положение, удалять неугодные датчики;
- Смещать, поворачивать и масштабировать набор датчиков;
- Связывать датчики с фасетками;
- Импортировать и экспортировать датчики;
- А также менять цвет, масштаб отображения датчика.
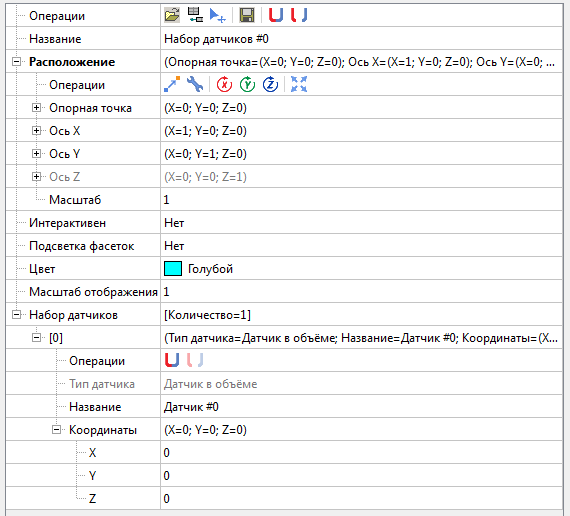
При создании набора датчиков по умолчанию уже создан один датчик. Помимо этого датчика можно создать новые датчики, подвигать их и удалить. Ограничений на создание датчиков нет: сколько пожелаете, столько датчиков и будет создано.
Вместе с набором датчиков создается локальная система координат (ЛСК).
По умолчанию ЛСК сонаправлена с глобальной системой координат (ГСК). Опорная точка набора датчиков выставляется в начало ЛСК. Меняя положение опорной точки, можно смещать ЛСК и весь набор датчиков.
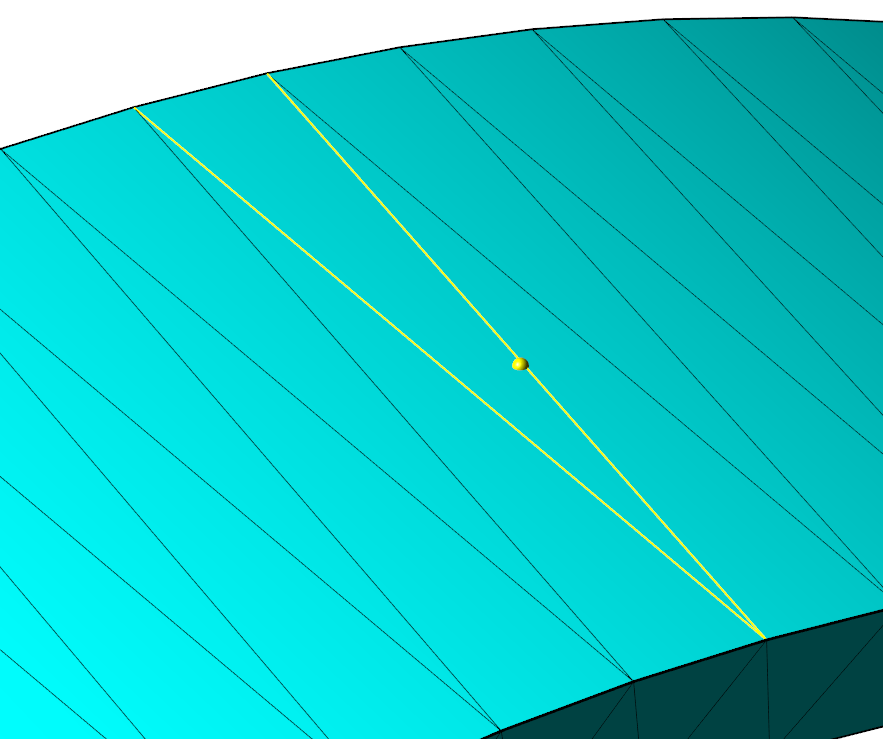
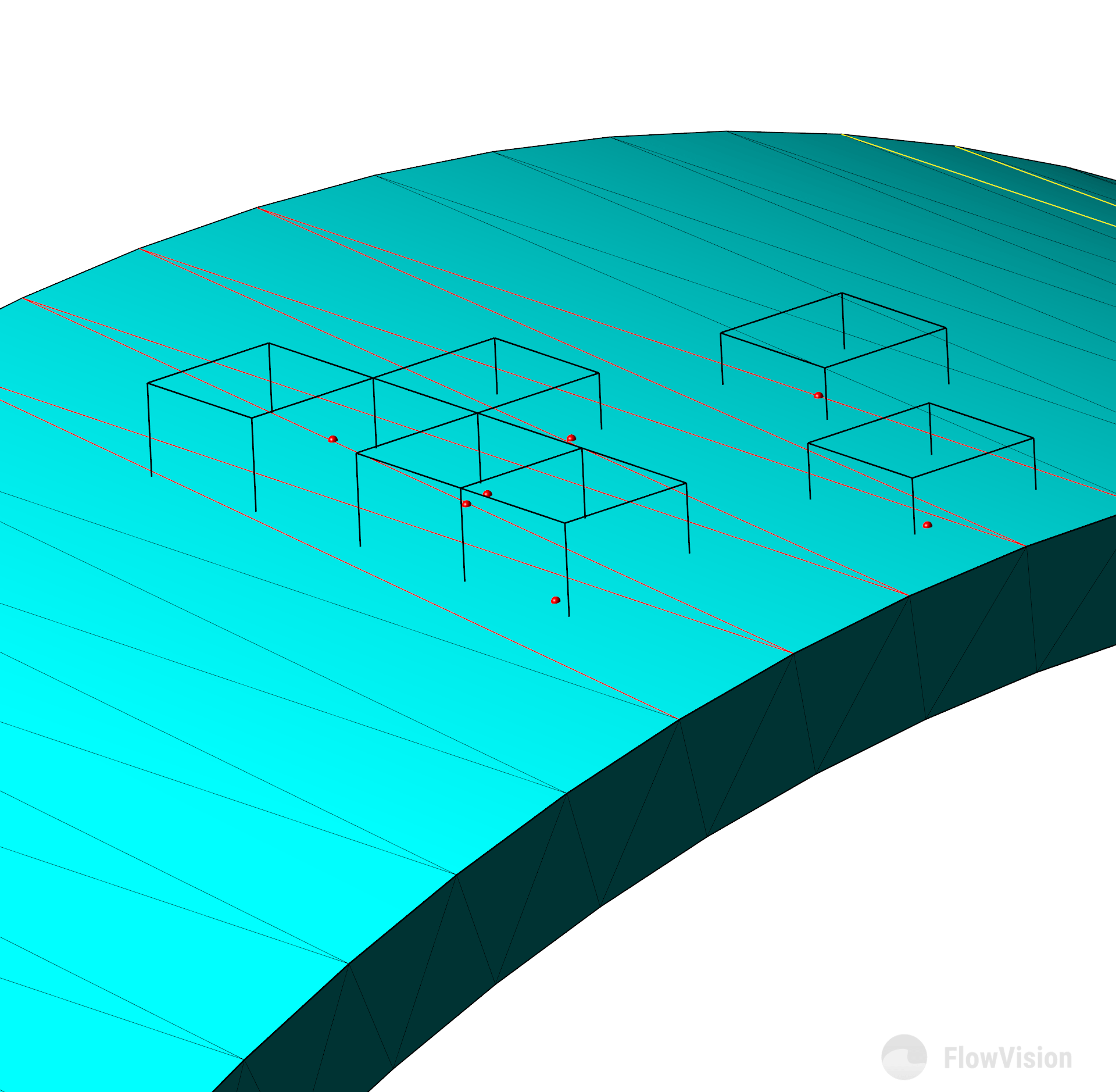
Помимо расположения датчиков в определенной точке расчётной области, есть возможность привязывать их к фасетке какой-нибудь поверхности, будь то граничное условие или подвижное тело.
Чтобы создать датчик, достаточно ткнуть в любое пространство расчетной области. Он будет автоматически привязан к необходимой фасетке по выбранному алгоритму. Есть два алгоритма привязки к фасетке:
- К ближайшей фасетке: датчик будет создан на ближайшей к «монитору» фасетке, даже если это ГУ скрыто.
- К граничному условию: датчик будет создан на ГУ, которые выбрано.

Для удобства добавлен параметр «Подсветка фасеток»: позволяет подстветить фасетку, к которой был привязан датчик.
Данные для датчика, в случае привязки к фасетке, берутся или из центра ячейки (если отвязать датчик от фасетки), или берется интегральное значение с фасетки. В случае очень длинной фасетки, данные интерполируются в точку, где расположен датчик.
Стоит упомянуть, что если датчик привязан к фасетке, а тело с фасеткой движется, то и датчик будет двигаться соответственно.
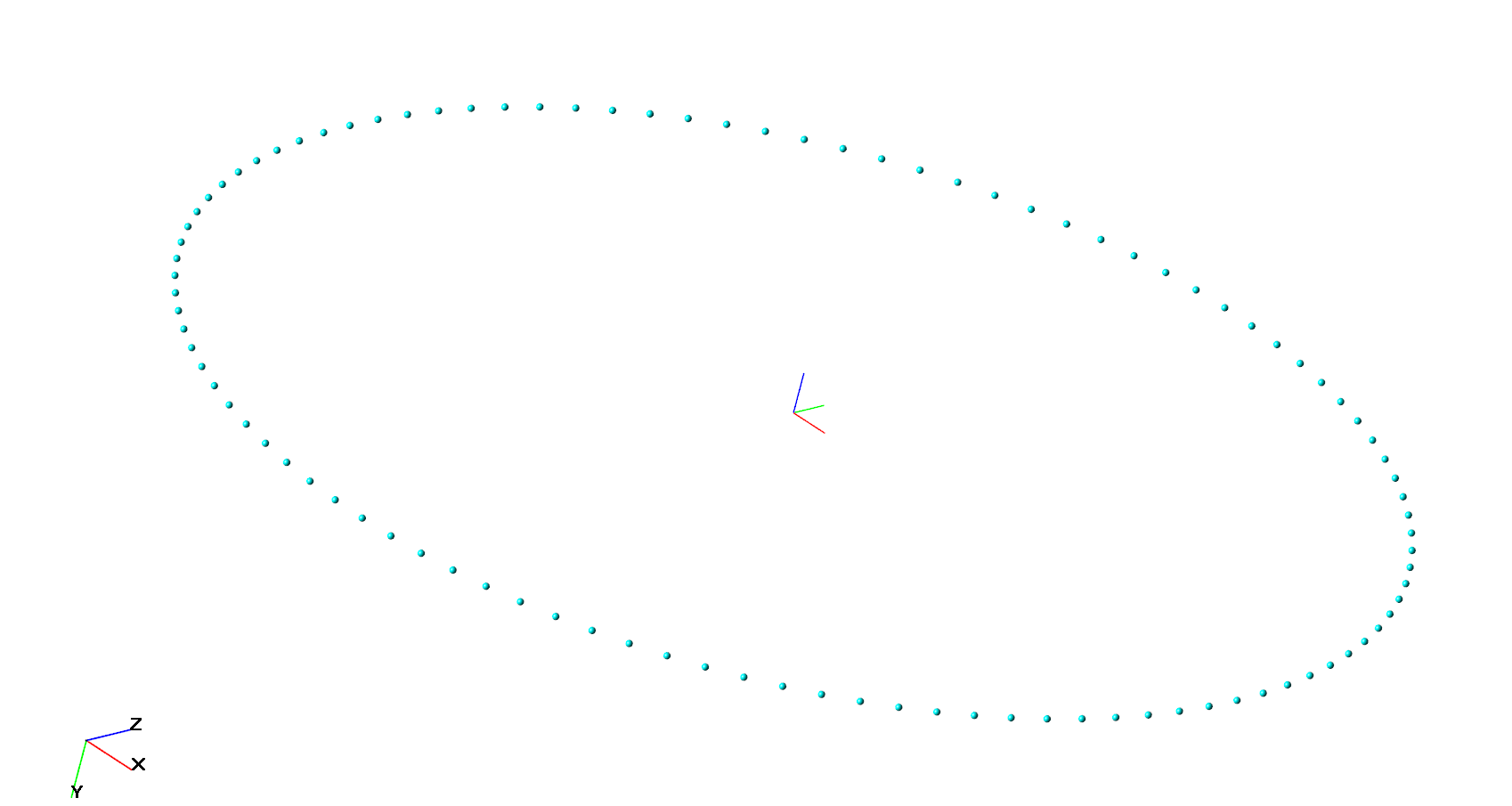
Важной особенностью датчиков является возможность импорта и экспорта расположения датчиков. Особенно данный функционал полезен при наличии определенного закона расположения датчиков с определенным шагом смещения. Для этого достаточно:
- Задать таблицу XYZ с координатами датчиков в стороннем редакторе таблиц, например MS Excel;
- Сохранить эту таблицу в текстовом файле;
- Импортировать ее во FlowVision.
Работа с набором датчиков
С набором датчиков можно делать следующее:
- Создавать характеристики;
- Задавать движение датчиков;
- Копировать/удалять;
- Создавать на нем слой «Набор ячеек» в Постпроцессоре.
В целом работа с датчиками ничем не отличается от работы со стандартными объектами FV:
- С копировать/удалять все понятно.
- С созданием характеристик тоже. Но если все-таки есть какие-то проблемы, то вот статья. Стоит отметить, что для набора датчиков доступны все те же самые переменные, а также есть возможность выводить данные с этих характеристик как в *.glo файл, так и в критерии останова (с определенного датчика в наборе).
- Из слоев для датчиков доступен лишь слой «Набор ячеек». Слой будет строиться при двух условиях:
- Если в ячейку попал датчик, соответственно;
- Если тип ячейки соответствует выбранном типу ячейки в отображении слоя.
Последнее действие, которое можно совершать с набором датчиков – всячески двигать их во время расчета. Процедура вращения или движения задается просто: правой кнопкой мыши нажимаете на нужный набор датчиков, создаете ему движение. После в окне свойств датчика задаете ему необходимые параметры. Датчикам можно задать:
- Поступательное движение (или ускорение);
- Вращательное движение с центром вращения (или ускорение).
Лицензирование, обучение и техническая поддержка FlowVision
Подробнее о программном решении FlowVision (Флоувижн): https://www.cad-is.ru/flowvision
По вопросам приобретения лицензий FlowVision, бесплатного предоставления полнофункциональной демонстрационной версии, обучения и технической поддержки, пожалуйста, обращайтесь к специалистам компании ООО "КАДИС" по следующим контактам: электронная почта info@cad-is.ru, телефон: +7 (499) 391‑63‑93 или через форму обратной связи: https://www.cad-is.ru/price

.svg)



























.jpg)
.jpg)


