

Последовательность технологических команд может быть отредактирована пользователем. При перерасчете операции внесенные изменения не сохраняются.
Выбранный узел дерева траектории может быть удален, скопирован или вырезан в буфер обмена с помощью стандартных клавиш:
- [Del] – удалить выбранный узел дерева команд;
- [Ctrl+X] – вырезать выбранную команду в буфер обмена;
- [Ctrl+C] – скопировать выбранную команду в буфер обмена;
- [Ctrl+V] – вставить команду из буфера обмена перед выбранной командой.
Окно редактирования параметров текущей команды открывается по двойному щелчку мышью на команде, либо через пункт <Редактировать> во всплывающем меню.
Заголовок окна определяется названием редактируемого узла, ниже идет список параметров выбранной команды. Окно не является модальным, т.е. его не нужно закрывать для редактирования параметров другого узла.

Редактирование подхода/отхода
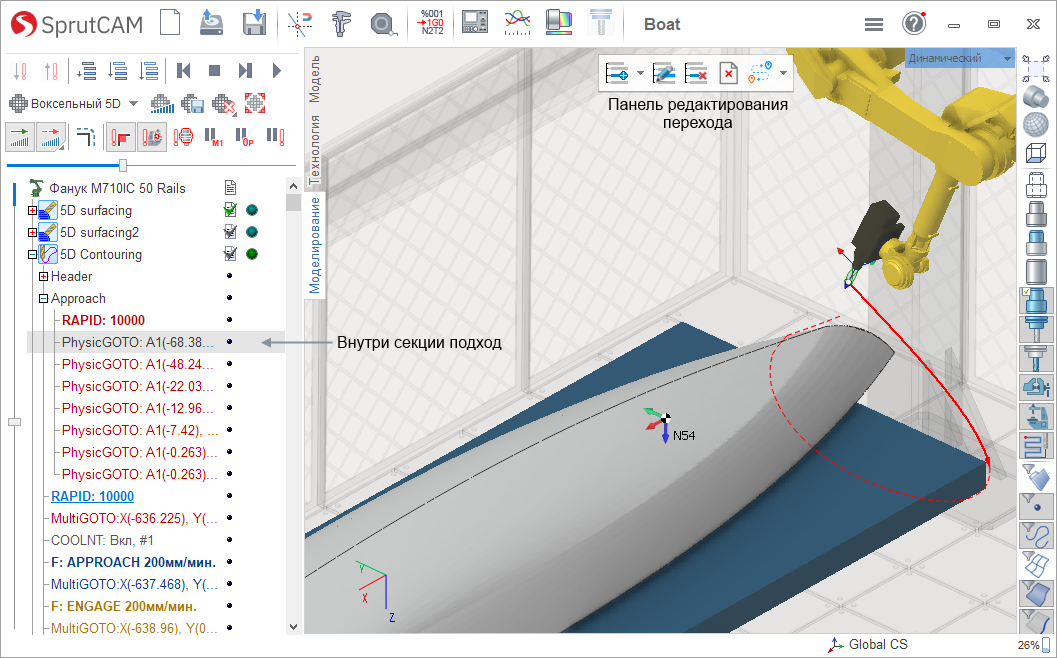
Если в дереве команд выбранный узел относится к подходу или отходу, то становится доступной панель редактирования подхода/отхода (см. скриншот). На этой панели находятся кнопки для более удобного редактирования подходов или отходов. Далее эти кнопки перечислены слева направо:

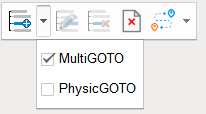
- Вставить текущее состояние – эта кнопка вставляет текущее состояние станка в дерево. Новая команда добавляется перед текущим выбранным узлом дерева.
С помощью выпадающего меню можно изменить тип вставляемого узла (PhysicGOTO или MultiGOTO).
- Изменить текущее состояние – по нажатию этой кнопки начинается редактирование текущего узла дерева в интерактивном режиме. Координаты выбранного узла будут синхронизироваться с текущим положением станка. Чтобы окончить редактирование нажмите эту кнопку еще раз.
- Удалить текущее состояние – удалить выбранный узел дерева команд.
- Очистить подход/отход – удаляет все команды в подходе или отходе кроме последней (которая соответствует конечной точке подхода/отхода).
- Использовать планировщик пути (Motion Planner) - сгенерировать траекторию подхода или отхода автоматически (с заданной начальной и конечной точкой) с помощью одного из алгоритмов поиска пути. Параметры планировщика (например, максимальное время поиска пути) можно задать через выпадающее меню. На скриншоте ниже показан пример запуска планировщика пути и полностью автоматически сгенерированной траектории подхода. Если полученная траектория не совсем удовлетворительна, ее можно отредактировать с помощью данной панели.
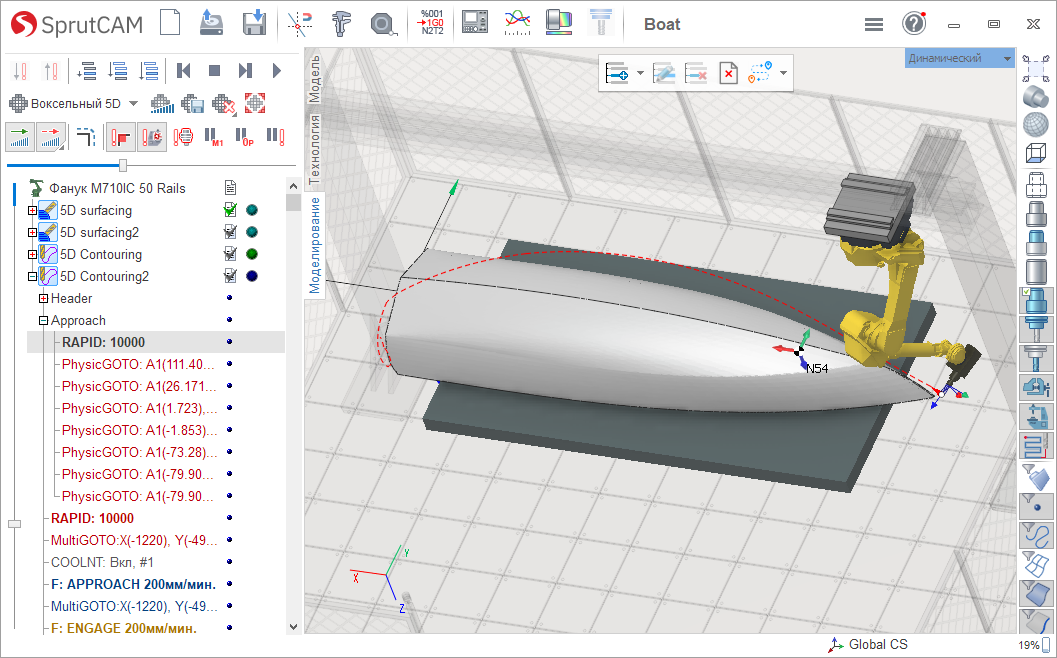
На этой картинке вся траектория подхода была сгенерирована автоматически с использованием планировщика пути. Если сгенерированная траектория не является удовлетворительной, интерактивное редактирование может использоваться для исправления подхода/отхода.

.svg)































.jpg)
.jpg)


